2026년 05월 12일 화요일
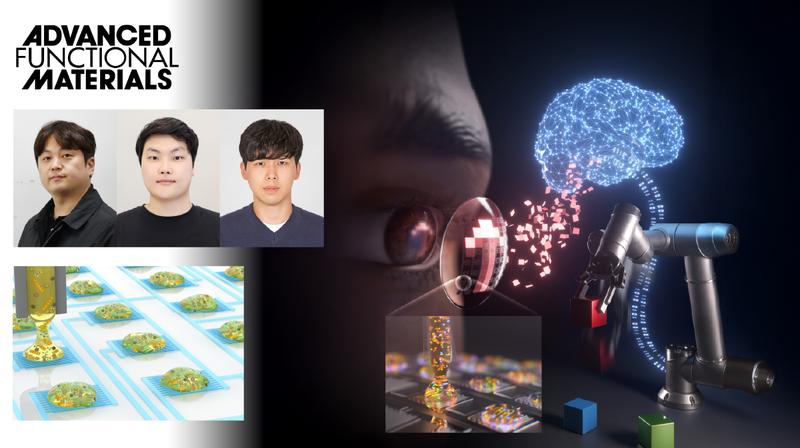
Ultrafast 3D Microfabrication Technology Produces Complex Structures in Just 60 Seconds
Abstract Despite the advantages of additive manufacturing (AM) in creating customized 3D shapes, conventional layer-by-layer approaches are limited by low production rates, restricting their broader applications. Volumetric additive manufacturing (VAM) has emerged as a promising technique, enabling the simultaneous photopolymerization of entire volumes, which significantly reduces fabrication time. However, current computed axial lithography requires manual operations per print cycle, such as loading resin into a vial, physically placing and aligning the vial (with or without an index-matching medium), and removing the printed object, limiting continuous, high-throughput production of multiple parts. Here, we propose a dispensing volumetric additive manufacturing (DVAM) method that prints and dispenses each part within a droplet in less than a minute. The printing process occurs within a single droplet dispensed from a glass pipette, enabling simultaneous printed object removal and resin replenishment in a second. Light pattern distortion caused by the absence of the index-matching fluid was corrected through real-time droplet profile estimation and inverse ray-tracing within the optical system. We demonstrate rapid serial VAM of 10 different objects within 10 min. This approach establishes a practical pathway toward scalable, high-throughput volumetric manufacturing, enabling rapid production of complex 3D structures without the operational bottlenecks of conventional VAM workflows. A research team affiliated with UNIST has achieved a major breakthrough in 3D microfabrication, enabling the rapid production of intricate 3D structures within a single minute. The new technology promises to significantly accelerate manufacturing processes in fields, ranging from biomedical devices to microelectronics. Led by Professor Im Doo Jung from the Department of Mechanical Engineering at UNIST, the research team developed a cutting-edge dispensing volumetric additive manufacturing (DVAM) system.The new approach moves beyond traditional layer-by-layer methods, allowing for the swift, continuous fabrication of diverse three-dimensional shapes within a matter of minutes by employing a volumetric printing process. DVAM utilizes a fine resin droplet dispensed from a glass pipette as the entire build volume. Light is projected onto the droplet to cure the desired shape in real-time. Once a structure is solidified, compressed air expels the finished object, and a new droplet is immediately dispensed for the next cycle. This seamless process enables high-speed, continuous production without the need for post-processing or layer-by-layer assembly. Unlike conventional volumetric printing methods—such as Computed Axial Lithography (CAL)—which require filling a resin container, matching refractive indices with immersion fluids, and manually removing finished parts, the UNIST team’s approach eliminates these constraints. By performing printing within a single resin droplet that acts as the entire volume, they achieve rapid, uninterrupted manufacturing. One of the main challenges was optical distortion caused by the droplet’s curved surface. To overcome this, the researchers integrated artificial intelligence with inverse ray-tracing optical calculations. A deep learning-based AI accurately detects the droplet’s profile in real-time, enabling the system to mathematically correct for distortions and project precise light patterns for uniform curing. This advanced system successfully produced intricate structures, such as the Eiffel Tower and The Thinker, within just 10 minutes—demonstrating the ability to fabricate ten different objects with an average time of around 60 seconds each. Hongryung Jeon, the first author of the study, explained, “Unlike traditional 3D printing that builds objects layer by layer, our method cures the entire volume at once and continuously dispenses resin without additional post-processing, increasing speed by over 100 times. This opens up exciting possibilities for large-scale, rapid production of micro-scale components.” Professor Jung, the corresponding author, emphasized, “Speed has long been a limiting factor in 3D printing, especially for customized manufacturing. By moving away from conventional photopolymerization and employing artificial intelligence to compensate for optical distortions, we have significantly advanced the potential of ultrafast volumetric fabrication. Now, complex shapes can be produced in seconds—eliminating long wait times.” The findings of this research have been published online in Advanced Functional Materials (Impact Factor: 19.0, top 5% in JCR) on March 21, 2026. The project was supported by the National Research Foundation of Korea (NRF), the Ministry of Science and ICT (MSIT), the Institute for Information & communications Technology Planning & Evaluation (IITP), and the Ministry of Trade, Industry & Energy (MOTIE). Journal Reference Hongryung Jeon, Yunsoo Lee, Seobin Park, et al., "Dispensing Volumetric Additive Manufacturing," Adv. Funct. Mater., (2026).